







Description
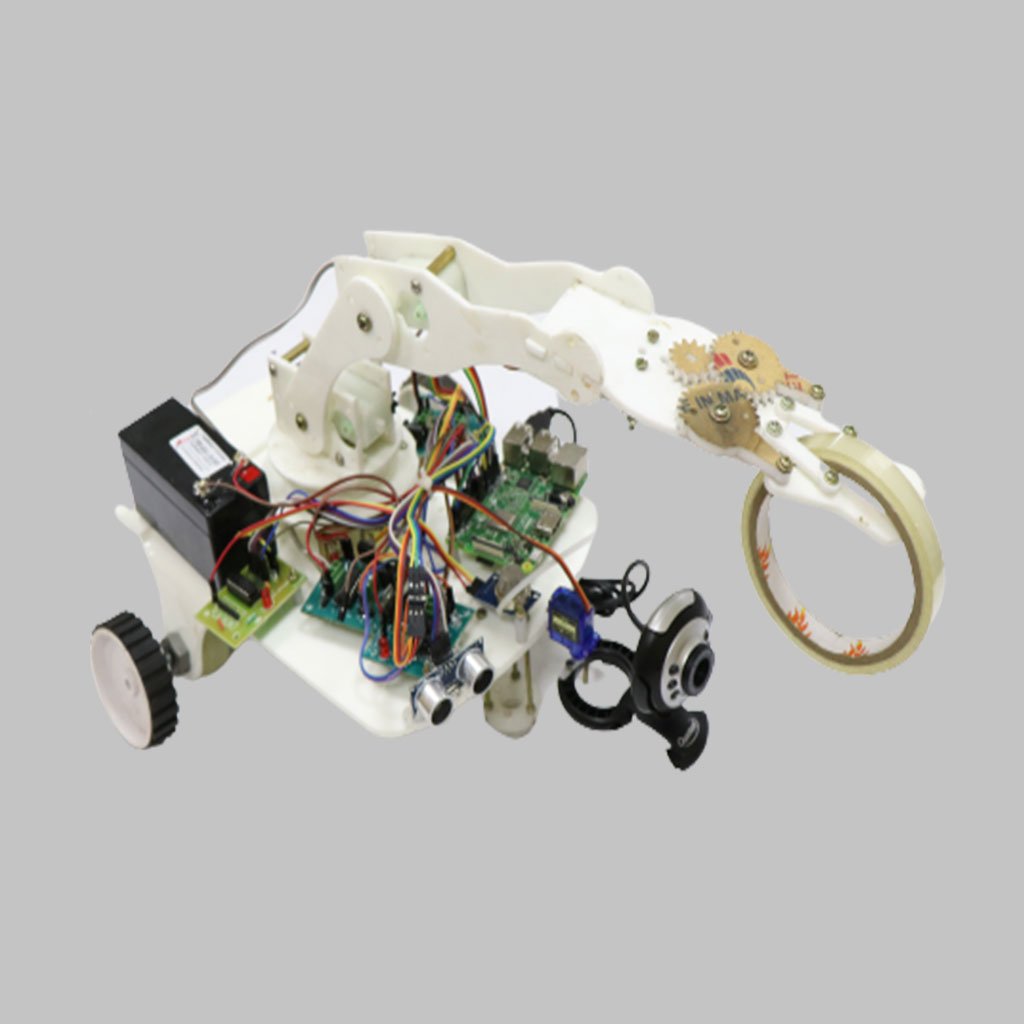
Pick and Place Robot
Pick and Place Robot using Raspberry Pi and OpenCV – Nowadays Robotics plays a major role in a lot of Automation Fields. Robotic Actions become more efficient in upcoming years. Starting from gesture, line follower, and Path follower several Path estimation algorithms are developed for robotic movement. Line follower user IR sensor to travel along the line. The main aim of the paper is to propose a system that has one robot which is used for pick and place applications used in industries. This system has Radio Frequency Modules for Communicating with the Robot with a Control system. RF Transmitter is interfaced with Raspberry pi and RF Receiver is connected to the Arduino UNO, Robotic setup is also interfaced with Arduino. Four Button is Present on the Transmitter Side if any one button is Pressed means it will send some information based on the information it will act.
INTRODUCTION
The robotic arm is a kind of mechanical arm that can be made to function like a human arm. In this work, an anthropomorphic robotic arm is designed and implemented and is controlled from a remote location using an RF module. This can find large-scale applications where direct human presence is a risk such as working in a radioactive environment or during bomb disposal. Several works were done in the past to mimic human hand movement, but some of the designs were complex and also costly. In this work, a very simple design is used and readily available low-cost materials are used to make the robotic arm. The arm is made using aluminum sheets. The finger movements are controlled by pulling them using cables that act as tendons of the human hand using servo motors. Considered Robotic ARM has one Base rotation containing 180-degree Servomotor and remaining all are DC motor with proper Delay.
EXISTING SYSTEM
In Existing system consists of Radiofrequency based robotic arm is based on Arduino UNO Microcontroller one servo and 3 DC motors are connected Depending upon the Signal it will work. In this system, information is transmitted in form of a Wired Connection to the Robotic Arm and Microcontroller.
PROPOSED SYSTEM
In order to overcome the difficulties in the existing system, we need to improve the whole system by transmitting the information in form of wireless by using RF Modules. Raspberry pi is interfaced with the RF Transmitter and the Receiver is connected to the Arduino Robotic setup also connected to Arduino itself. Transmitting Side four buttons used for Control System. If one button is Pressed means some signal is sent to the receiver depending upon the signal it will act. Pick and Place Robot?
BLOCK DIAGRAM

CIRCUIT DIAGRAM





BLOCK DIAGRAM EXPLANATION
In this System, we are using Two controllers one is Raspberry pi is interfaced with RF Transmitter and Arduino is connected to both the RF receiver and the Robotic Arm. On the Transmitter side, 4 switch is Available if the switch is Pressed means it will send a signal to the Receiver connected to the Arduino. Based on the signal it will act.
PROJECT DESCRIPTION
If we run the code means first we have to Press the Switch RF Transmitter will send the signal to RF Receiver connected to the Arduino. Motors along with driver circuits connected with Arduino Considered I am Pressing the Gripper button means I will pick the Object. All the information’s are shared in form of wireless
HARDWARE REQUIRED
- Raspberry pi
- RF Transmitter and Receiver
- Arduino
- Motor Driver
- DC Motor
SOFTWARE REQUIRED
- Raspbian Jessie
- Python
- Arduino IDE
CONCLUSION
The paper presents a robotic arm with seven degrees of freedom. The robotic arm was made of low-cost materials that were readily available. The model of the robotic arm was constructed and the functionality was tested. The use of an
RF module limits the remote access of the robotic arm to a few meters. Future work will involve using a ZigBee module so that the robotic arm could be controlled from a more distant location. The robotic arm can be controlled over the internet by using Ethernet connectivity and a camera for visual feedback.






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.