


Description
Object Picking Robot using Raspberry Pi – OBJECTIVE:
We can have developed by this project are Exploiting Recurrent Neural Networks and Leap Motion Controller for the Recognition of Sign Language and Semaphoric Hand Gestures
ABSTRACT:
The main motive of this paper is proposing a Pick and Place robot that provides an efficient and simple method for pick and place robots. Robotic control can be achieved by using Leap Motion Controller. ultrasonic sensors which prevent the robotic vehicle from colliding with any obstacle. Capacitive for plastic separation inductive for metal separation moisture sensor for wet and dry waste separation. Now a day?s humans only separate that degradable and non-degradable waste by this they are facing a lot of Diseases. Leap motion is used to move that robot if the robotic arm finds and detects that type of waste it will pick and put it in a separate box. By using SVM leap motion controller classifies that each hand gesture gives it to the input for robot movement.
INTRODUCTION:?
Robotics is related to electronics, mechanics, and software technology. Today research on robotics is focused on developing systems that exhibit modularity, flexibility, redundancy, fault tolerance. A general and extensible software environment and seamless connectivity to other machines are some of the characteristics some researchers focus on completely automating a manufacturing process or a task. Robots are normally designed by providing sensor-based intelligence to the robot arm, while others try to solidify the analytical foundations on which many of the basic concepts in robotics are built.?
One special class of robot which finds wide application is the pick and place robot, which is a microcontroller-based mechatronics system that detects the object picks that object from the source location, and places it at the desired location. For detection of an object, the robots are installed with infrared sensors which detect the presence of the object as the transmitter to receiver path for the infrared sensor is interrupted by the placed object.
The various mechanisms used for waste separation in India are as follows.
- Human intervention
- Picking, Screening
- Air Classification
- Magnets, Optical separation?
- Eddy current and Flotation
EXISTING SYSTEM:
- In the existing system, they Proposed a robot for waste management system by comparing the wet and dry waste
- By using an android application, they can compare the waste if the app returns 0 means degradable waste
- And application returns 1 means it is non-degradable information sent to the microcontroller (Arduino UNO).
- Based on Microcontroller action Pick and Place Robot will operate put that classified waste in a separate box.
- For comparison, they are using some simple image processing algorithms
PROPOSED SYSTEM:
- In the existing system, they are using image processing but in the dark areas it won’t work it requires proper lighting
- So, we go for sensor-based system humidity, IR Sensor, Capacitive proximity sensor, and inductive Proximity sensor interfaced with Raspberry Pi.
- Humidity ? Wet or Dry waste
- IR Sensor ? detecting waste
- All the sensors are placed in a robotic arm if the type of waste is detected alert is given we control the robot using the leap motion controller
- We give some priority to the sensor for example we take humidity it will search for wet waste for some time if it is detected it will pick a place to that respective box
- Afterward, it goes for another sensor. It is based on what priority we set.
BLOCK DIAGRAM:
???????????????????????????????????????????????????

BLOCK DIAGRAM EXPLANATION:
- This Proposed system consists of a Sensor for detecting waste materials, Raspberry pi for Processing, It indication and Leap motion for controlling the robotic arm
- Different gestures are given to the input for the Leap motion controller
- Left – Pick & Pace the object Left
- Right – Pick & Pace the object Right
- Down – Move Robotic Arm down
- Up – Move Robotic Arm up
- Open ? Open robotic hand
- Close ? Close robotic hand
- Clockwise ? Rotate arm clockwise
- Anti-clockwise ? Rotate arm anti-clockwise
- If we move the robot using this leap motion controller if the waste is detected buzzer will glow that time we do that pick operation
- Hand gestures are classified using SVM (Support vector machine)?
- Based on the priority that we gave it will pick that type of waste material.
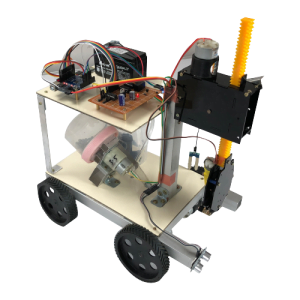
HARDWARE TOOLS:
- Raspberry pi
- IR Sensor?
- Soil Moisture?
- Leap Motion?
- Robotic setup
SOFTWARE TOOLS:
-
- Arduino IDE
- ROS
- MATLAB
APPLICATION:
- Pick and place?
- Automation Industries
REFERENCE:
- An elementary introduction to image processing- Ankur Agarwal, IIT-Kharagpur.
- K. Dhayalini & A. Durgadevi, ?IoT based design and analysis of robotic vehicle movement in military applications?, International Journal of innovations and advancement in computer science, Vol.6, No.11, 2017, pp.668-723.
- T. Yang, G. De Marco, M. Ikeda, L. Barolli, ?Impact of Radio Randomness on Performances of Lattice Wireless Sensor Networks based on Event-Reliability Concept?, International Journal of Mobile Information Systems (MIS), Vol. 2, No.4, pp. 211-227, 2006.?
- [6] M. Ikeda, G. De Marco, T. Yang, L. Barolli, ?Performance Analysis of an Ad Hoc Network for Emergency and Collaborative Environments?, Journal of Telecommunication Systems, Springer, Vol. 38, No. 3-4, pp. 133-146, 2008.
- ?[7] K. McMahan, and J. Wehrspann, ?The Future of Farming?, Farm Industry News, pp. 18-37, February 2008.






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.