

Description
Vehicle To Vehicle Communication using LiFi Arduino
Abstract:
Vehicle To Vehicle Communication using LiFi Arduino – In our concept, we are going to discuss vehicle-to-vehicle communication at the same time we control our vehicle by using some controller setup. With the help of the controller we can monitor the obstacles in front of our vehicle after then we find the object is movable or unmovable and we detect and instruct another vehicle after finally, we control that vehicle also. And one more thing we going to detect the physical parameter of the car and control our vehicle also. Parameters like temperature and gas level that we will detect and automatically control the car.Vehicle To Vehicle Communication using life Arduino
Vehicle To Vehicle Communication using LiFi Arduino
Introduction :
There has been rapid growth in the Automobile industry across the globe. With an ever-rising population, more and more people move to the cities, leading to faster urbanization. With the rise in automation and the Internet of Things (IoT), technology has increased the standard of living. In this work, I have used the Li-Fi technology and ultrasonic range sensor to create a system that can detect and avoid collisions between two cars. The two cars can communicate using Li-Fi. The V2V communication ensures the safety and prevents accidents. The cars designed using the proposed systems are known as smart cars because they can communicate and are capable to detect problems and avoid collisions. They deal with the proposed system’s design for collision detection including hardware details and flow charts, It comprises the algorithm of the system design. The results and system hardware design and automatic collision detection are not less than the revolution in the transport industry.
Vehicle To Vehicle Communication using LiFi Arduino
Existing system:
In the previous method, the system is designed with the help of a Bluetooth module. As the Bluetooth module works under low range and also difficult to pair the data transmission from one vehicle to another vehicle was difficult.
Proposed system:
- Easy to access the data
- Manage the speed of that vehicle
- Communicate with another vehicle
Block diagram:

Node 2:

Flow Explanation:
In node is used to detect the object and find that object is the movable or unmovable object with the help of an ultrasonic sensor. If it is an unmovable object means sending an alert to the node to the vehicle and that is controlled automatically at the exact node vehicle is also controlled and at the same time, we monitor the node 1 vehicle’s physical parameter, if fixed-parameter exceed means that node vehicle automatically controlled. And the main thing the communication between the node1 vehicle to node2 vehicle achieved by using the LiFi, and another vehicle to data is sending the wifi using to data is sending near the vehicle.
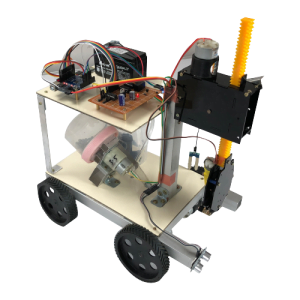
Hardware:
- Arduino -2
- LiFi Transmitter, receiver
- Ultrasonic sensor
- Temperature sensor
- Gas sensor
- Robot setup.
- LCD
- Buzzer
Software:
- Arduino IDE
- Language: Embedded C
Advantages:
- Monitoring entire details of that vehicle in each minute
- Communicate with other Vehicles and control those vehicles also.
- Avoiding accidents.































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.