




Description
Pipe Crawling Robot – Abstract
Pipe Crawling Robot using Raspberry Pi – The proposed concept in this paper is to replace the manual work in drainage cleaning with an automated system. Impurities in drainage water can be only like empty bottles, polythene bags, papers, etc. These impurities present in drainage water can cause blockage in the drainage system. The drainage system can be cleaned from time to time manually or such a system can be designed that will automatically throw out wastages and will keep the water clean. This project is designed to keep clean the drainage system and help the smooth working of the system. This project automatically cleans the water in the drainage system each time any wastage appears and this forms an efficient and easy way of cleaning the drainage system and preventing the blockage. We designed our project to use this inefficient way to control the robot disposal of wastages and with regular filtration of wastage, substances are treated separately and monitored the disposal in a frequent manner.
INTRODUCTION?
In today?s era automation plays a very important role in all industrial applications for the proper disposal of sewage from industries and household is still a challenging task. In India, drainage systems are usually open which leads to the disposal of solid waste and that causes blockage. Drains are used for the adequate disposal of waste and unfortunately, sometimes there may be a threat to human life during the cleaning of blockage in the drains or it can cause serious health issues because of the pertaining problems like malaria, dengue, etc. In order to overcome this problem as well as to save human life we implement a design ?Automatic Drainage Cleaning System?. We designed our project in order to use it in an efficient way to control the disposal of waste along with regular filtration of drains, removal of solid waste in order to avoid blockage in drains to promote a continuous flow of drainage water which ultimately reduces the threat to human life
Existing system
- In these cases, normal operation of sewage cleaning is done by using big machines with large manpower involvement
- The human cleaning process to unsaved human life from drainage cleaning is a very long and complicated process
- It is time taking process and also risky in various ways
- Sensor-based only sewage monitoring system. The system senses the drainage blockage only.
Proposed system
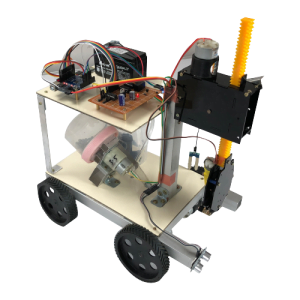
- They designed a robot for cleaning the drainage. This robot is capable of moving inside the drainage, according to the human comment, and also picking and placing based on arm design.
- This robot is operated through our comment with the help of wireless Bluetooth technology and a camera that gives both audio and video signals on the monitor
- The disposal of wastages is captured from drainage with a USB Camera and monitored on a PC
- It is a low-cost human-controlled robot used to monitor and gives an insight view of disposal of wastages and with regular filtration of wastage, substances are treated separately and monitor the disposal in a frequent manner.
Block diagram

Hardware required
- Raspberry pi
- Camera
- Ultrasonic sensor
- Robot setup
Software required
-
- Raspberry pi OS: Raspbian stretch
- Programming Platform: python 3 IDLE
- Programing language: python 3
- Library: OpenCV
Reference
1] Shao, Lei, Yi Wang, Baozhu Guo, and Xiaoqi Chen, “A review over state of the art of in-pipe robot,” in Mechatronics and Automation (ICMA), 2015 IEEE International Conference on, pp. 2180-2185. IEEE, 2015
[2] Li, Zhao, Q. Z. Wang, Jin Li, Y. F. Liu, C. J. Liu, Lin Cao, and W. J. Zhang, “A new approach to classification of devices and its application to classification of in-pipe robots,” in Industrial Electronics and Applications (ICIEA), 2016 IEEE 11th Conference on, pp. 1426-1431. IEEE, 2016.
[3] Sibai, Fadi N., Amer Sayegh, and Ihsan Al-Taie, “Design and construction of an in-pipe robot for inspection and maintenance,” in Computer Systems and Industrial Informatics (ICCSII), 2012 International Conference on, pp. 1-6. IEEE, 2012.
[4] Ismail, Iszmir Nazmi, Adzly Anuar, Khairul Salleh Mohamed Sahari, Mohd Zafri Baharuddin, Muhammad Fairuz, Abd Jalal, and Juniza Md Saad, “Development of in-pipe inspection robot: A review,” in Sustainable Utilization and Development in Engineering and Technology (STUDENT), 2012 IEEE Conference on, pp. 310-315. IEEE, 2012.
[5] Kim, Ho Moon, Jung Seok Suh, Yun Seok Choi, Tran Duc Trong, Hyungpil Moon, Jachoon Koo, Sungmoo Ryew, and Hyouk Ryeol Choi, “An in-pipe robot with multi-axial differential gear mechanism,” in Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, pp. 252-257. IEEE, 2013.






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.