








Description
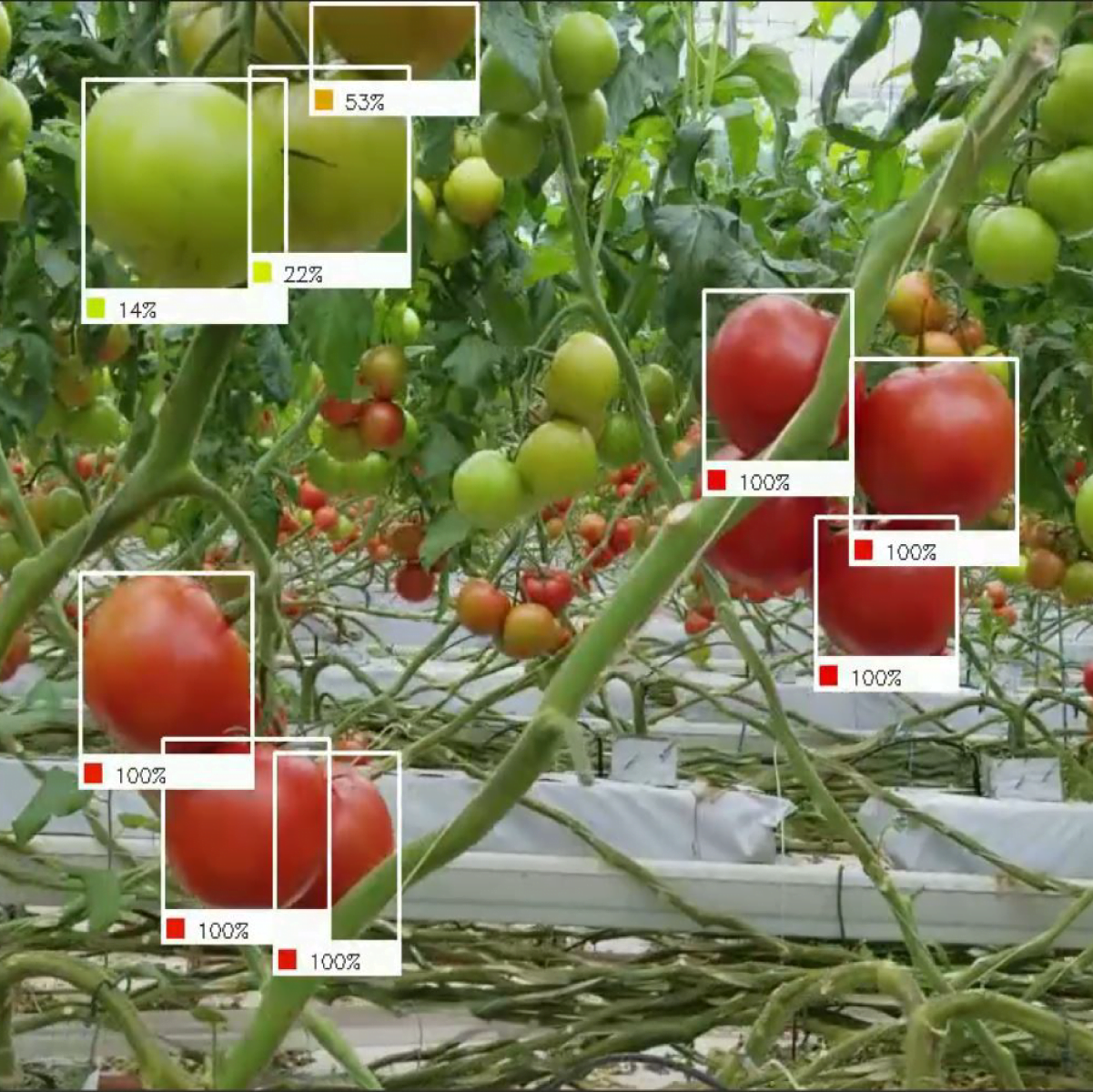
Pedestrian Detection using Matlab
In this conception efficient Pedestrian organization is introduced to sight the multiple road face walking pedestrian in the processing of serial frames changes and classification of the pedestrian over the other moving objects. Texture and color unit a pair of primitive types of choices which will be won’t explain a scene. Whereas normal local binary pattern (LBP) texture-based background subtraction performs well on texture flush regions achieving pedestrian protection at intervals in the sector of computer vision. Here the task of pedestrian detection (PD) involves stages like pre-processing, ROI choice, feature extraction, classification, verification/refinement, and trailing. Of all the steps involved at intervals in the framework, the paper presents the work done towards implementing the feature extraction and classification stages notably. It’s of predominant importance that the extracted choices classifier distinguishes between a pedestrian and a non-pedestrian. The given work focuses on the implementation of the LBP abstract background changes obtaining and histogram of orientated Gradients (HOG) choices with modified parameters to Classifying is achieved exploitation Support Vector Machine (SVM).
Introduction
The identification of objects during an image and would altogether probability begin with image methodology techniques like noise removal, followed by (low-level) feature extraction to hunt outlines, regions, and probably unit-like positive textures. One reason typically bean flinch is that degree object will seem terribly altogether distinction once viewed from wholly altogether totally different completely different} angles or at a lower place different lighting. an image might be a few of your time an ns took as a two-dimensional array of brightness values and is most familiarly pictured by such patterns as those of pictures, sliders, diode LCD TV screen, or show screen
Existing Systems
- Sift based sparse features representation
- Feature descriptor algorithms such as BRIEF
Drawbacks of Existing System
- The sparse illustration doesn’t contain data concerning texture.
- It has poor discriminatory power
- It is poor to characterize the excellence of data
Proposed Systems
- LBP based background learning
- HOG based Feature extraction
- SVM classification
ADVANTAGES
- Robust to Illumination changes
- Low complexity
- Retain Contrast Information
Pedestrian Detection using Matlab
Block Diagram

Pedestrian Detection using Matlab
Preprocessing:
Image Pre-processing? is a common name for operations with?images?at the lowest level of abstraction. Its input and output are intensity? images. The aim of?pre-processing?is an improvement of the?image?data that suppresses unwanted distortions or enhances some images? features important for further processing.
Image restoration is the operation of taking a corrupted/noisy image and estimating the clean original image. Corruption may come in many forms such as motion blur, noise, and camera misfocus.? Image restoration is different from image enhancement in that the latter is designed to emphasize features of the image that make the image more pleasing to the observer, but not necessarily to produce realistic data from a scientific point of view. Image enhancement techniques (like contrast stretching or de-blurring by the nearest neighbor procedure) provided by “Imaging packages” use no a priori model of the process that created the image.? With image enhancement noise can be effectively be removed by sacrificing some resolution, but this is not acceptable in many applications. In a Fluorescence Microscope resolution in the z-direction is as bad as it is. More advanced image processing techniques must be applied to recover the object.? De-Convolution is an example of an image restoration method. It is capable of Increasing resolution, especially in the axial direction removing noise increasing contrast.
Pre-processing? is a common name for operations with?signals?at the lowest level of abstraction.
The aim of?pre-processing?is an improvement of the?signal?data that suppresses unwanted distortions or enhances some signal? features important for further processing.
The high-pass pre-emphasis filter can then be applied to equalize the energy between the low and high-frequency components of speech.
Pedestrian Detection using Matlab
Feature extraction:
- In machine learning, pattern recognition, and? image processing,?feature extraction starts from an initial set of measured data and builds derived values (features) intended to be informative and non-redundant, facilitating the subsequent learning and generalization steps.
- Feature extraction is a type of dimensionality reduction that efficiently represents interesting parts of an image as a compact feature vector. This approach is useful when image sizes are large and a reduced feature representation is required to quickly complete tasks such as image matching and retrieval.
- In this research, the performance of speaker verification based on different MFCC feature extraction methods was evaluated.
- Person identification based on finger-vein patterns. An image of a finger captured under infrared light contains not only the vein pattern but also irregular shading produced by the various thicknesses of the finger bones and muscles. The proposed method extracts the finger-vein pattern from the unclear image by using line tracking that starts from various positions. Experimental results show that it achieves robust pattern extraction, and the equal error rate was 0.145% in personal identification
- Biometric technologies are based on an individual’s biological and behavioral characteristics. This system includes the human finger, vein, iris, hand, and many others as its identifiers. A Biometric system using finger-vein as one of its traits is most widely accepted
Pedestrian Detection using Matlab
KNN classifier:
In? statistics, the? k-nearest neighbors algorithm? (k-NN) is a?non-parametric?classification?method first developed by? Evelyn Fix? and? Joseph Hodges? in 1951,[1]? and later expanded by? Thomas Cover.[2]?It is used for?classification?and?regression. In both cases, the input consists of the?k?closest training examples in? the data set. Does the output depend on whether? k-NN is used for classification or regression:
- In? k-NN classification, the output is a class membership. An object is classified by a plurality vote of its neighbors, with the object being assigned to the class most common among its?k?nearest neighbors (k? is a positive? integer, typically small). If?k?=?1, then the object is simply assigned to the class of that single nearest neighbor.
- In? k-NN regression, the output is the property value for the object. This value is the average of the values of?k?nearest neighbors.
k-NN is a type of? classification, where the function is only approximated locally and all computation is deferred until function evaluation. Since this algorithm relies on distance for classification if the features represent different physical units or come in vastly different scales then? normalizing? the training data can improve its accuracy dramatically.
Both for classification and regression, a useful technique can be to assign weights to the contributions of the neighbors, so that the nearer neighbors contribute more to the average than the more distant ones. For example, a common weighting scheme consists in giving each neighbor a weight of 1/d, where’d?is the distance to the neighbor.
The neighbors are taken from a set of objects for which the class (for? k-NN classification) or the object property value (for? k-NN regression) is known. This can be thought of as the training set for the algorithm, though no explicit training step is required.
A peculiarity of the? the k-NN algorithm is that it is sensitive to the local structure of the data.
Segmentation:
Segmentation problems are the bottleneck to achieving object extraction, object-specific measurements, and fast object rendering from multi-dimensional image data. Simple segmentation techniques are based on local pixel-neighborhood classification. Such methods fail however to? see? global objects rather than local appearances and require often intensive operator assistance. The reason is that the? logic? of an object does not necessarily follow that of its local image representation. Local properties, such as textures, edginess, ridges, etc. do not always represent connected features of a given object.
Hardware Requirements
- system
- 4 GB of RAM
- 500 GB of Hard disk
Software Requirements
- MATLAB 2018b
Pedestrian Detection using Matlab
REFERENCES:
[1] R. Cutler, L. Davis,?Robust Real-Time Periodic Motion Detection, Analysis, and Applications,? IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 8, pp. 781-796, 2000.
[2] Bertozzi, M. Broggi, A. Cellario, M. Fascioli, A. Lombardi, P. Porta, ?Artificial vision in road vehicles,? Proceedings of the IEEE, vol. 90, no. 7, pp.1258 -1271, 2002.
[3] C. Stauffer, W. E. L. Grimson, ?Learning Patterns of Activity Using Real-time Tracking,? IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, pp. 747-757, 2000.
[4] A. Elgammal, R. Duraiswami, D. Harwood, L. Davis,?Background and Foreground Modeling Using Nonparametric Kernel Density Estimation for Visual Surveillance,? Proceedings of the IEEE, vol. 90, pp.1151-1163, 2000
[5] M. Lalonde, M. Beaulieu, and L. Gagnon, ?Fast and robust optic disc detection using pyramidal decomposition and Hausdorff-based template matching,? IEEE Trans. Med. Imag., vol. 20, no. 11, pp. 1193?1200, Nov. 2001






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.