



Description
Fire Fighting Robot using Raspberry Pi and OpenCV
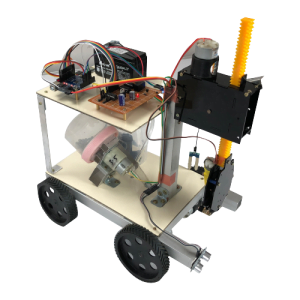
AUTONOMOUS FIRE FIGHTING ROBOT
ABSTRACT:
Disaster response, especially fire-fighting and rescue, is highly risky for firefighters engaged in action. As a result, many robots intended for fire-fighting have been proposed. However, it is difficult for them to directly access fire sources because their mobility is limited. Specifically, existing robots are large and heavy. Therefore, we propose a novel hose-type robot, which can automatically detect the fire in the area and automatically turn on the pump. This ultrasonic sensor is used to navigate through the area and also detect the movement of a human in that area it sends an alert to the security system so the firefighter can easily identify a person’s location. With the help of robots, we can easily fight under difficult conditions.Fire Fighting Robot using Raspberry Pi and OpenCV
INTRODUCTION:
During disaster response, fire-fighting and life-saving take place in a harsh and risky environment for the firefighters engaged in this task. During a fire extinguishing activity, it is desirable to discharge water directly on the fire source by firefighters stationed away from the fire. However, it is difficult to directly access the fire source. Particularly, in a large-scale fire, it is difficult for a firefighter to extinguish the fire inside a building where it has spread. In such a case, the objective is none other than preventing the fire from spreading outside of the building. Various conventional robot systems have been proposed for fire extinguishing purposes. Many of them are terrestrial mobile robots or search robots, which are equipped with fire hoses. It is difficult to directly access the interior of a building that is on fire because the robots are often designed to move on a flat surface.Fire Fighting Robot using Raspberry Pi and OpenCV
EXISTING SYSTEM:
With the continuous development of the national economy and improvement of the standard of living, there are more and more practical operating situations that are not suitable for people’s manual operations in the vehicle, such as disaster handling, the demolition of dilapidated buildings, dirt-cleaning, chemical waste management, and some other dangerous or poor environment occasions. Using remote-controlled equipment to perform various works in an adverse environment, e.g., fire rescue has become an urgent problem. A new remote-controlled emergency handling and fire-fighting robot which can be used in practical situations have been developed on the basis of a small multi-function crawler hydraulic excavator. It can greatly enhance the operating security and it is significant in the aspects of avoiding casualties and reducing property losses.Fire Fighting Robot using Raspberry Pi and OpenCV
DISADVANTAGE:
- Large in size.
- High cost.
- The accuracy level is very Low.
- Efficiency is very low.
PROPOSED SYSTEM:
The purpose of the robot is to directly access the fire source on behalf of firefighters and perform the fire extinguishing task quickly and safely. In this, the robot automatically detects the fire and turns on the pump when the fire is started. With the help of a fire sensor, the PIC microcontroller detects the fire and using an Ultrasonic sensor the obstacle detects the robot automatically recreates the path with itself. And using the PIR (passive infrared) sensor the human is detected by the robot and the buzzer alert the control unit which shows the location of the person and makes it easy to identify by the rescuers.Fire Fighting Robot using Raspberry Pi and OpenCV
ADVANTAGE:
- Small in size.
- Easy to implement.
- Better efficiency to detect the person.
- Autonomous operation is possible.
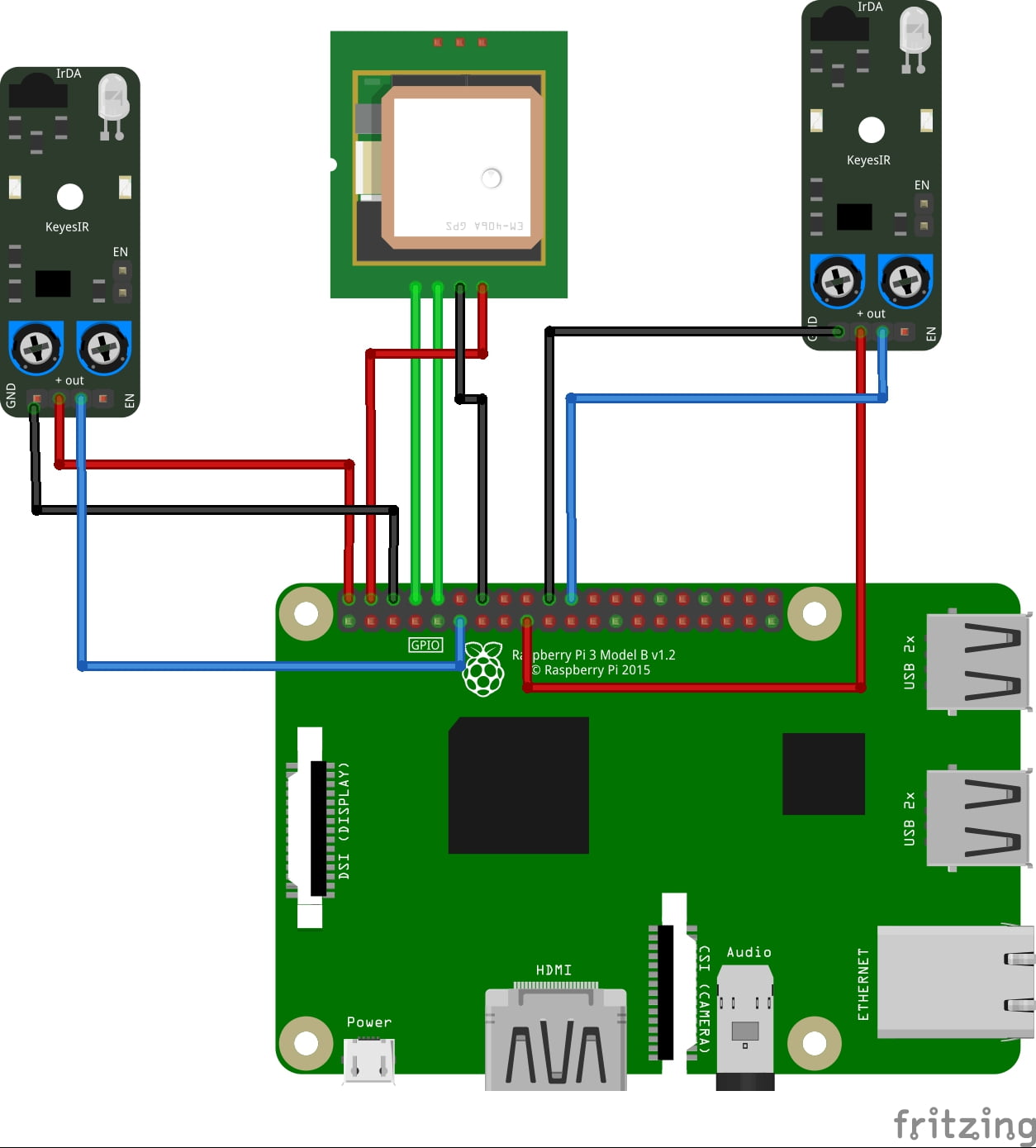
BLOCK DIAGRAM:
HARDWARE REQUIREMENT
- Node MCU
- PIR
- Fire Sensor
- Ultrasonic sensor
- Pump
- LCD
- Buzzer?
- Motor
SOFTWARE REQUIREMENT
- Embedded IDE






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.