














Description
INTRODUCTION:
Churn Modelling Analysis using Deep Learning | PythonCustomers have multiple options in the form of better and less expensive services. The ultimate goal of the Banking sector is to maximize their pro?t and stay alive in a competitive marketplace when a vast percentage of clients are not satisfied with the services of any Banking sector. It results in the service migration of customers who start switching to other service providers. Customer prediction is vital in the banking sector as banking operators have to retain their valuable customers and enhance their Customer Relationship Management(CRM) Churn Modelling Analysis using Deep Learning | Python
Abstract:
- The paper reviews the relevant studies on Customer Churn Analysis in Telecommunication Industry
- Churn Analysis is one of the worldwide used analyses on Subscription Oriented Industries to analyze customer behaviors to predict the customers who are about to leave the service agreement from a company. Churn Modelling Analysis using Deep Learning | Machine Learning Projects
- The proposed modest classic?es churn customers’ data using classic? cation algorithms, in which the Random Forest(RF) and Decision tree(DT) algorithm performed well with 90.44% correctly classified instance churn Modelling Analysis using Deep Learning | Python
Motivation:
- The prediction Model will describe to you whether to invest in the proposal or not. Here, we choose to minimize the risk of investing, i.e. we aim to minimize investing in proposals for which the loan will not be paid back.
Scope of The Project:
- In this proposed project we designed a protocol or a model to detect the payment activity in credit card transactions.
- This system is capable of providing most of the essential features required to detect paymentulent and legitimate transactions. Churn Modelling Analysis using Deep Learning | Python
- As technology changes, it becomes difficult to track the behavior and pattern of payment sent transactions.
- With the rise of machine learning, artificial intelligence, and other relevant fields of information technology, it becomes feasible to automate this process and save some of the intensive amounts of labor that is put into detecting credit card payments.
Churn Modelling Analysis using Deep Learning | Python
Existing System:
- Earlier it was predicted only for banking sector customers? dataset
- Also, there was one algorithm used for prediction purposes at a time.
- Accuracy wise it was not accurate.
- However, it is not possible to extract the useful information hidden in these data sets, unless they are processed properly.
- ?In order to find out this hidden information, various analyses should be performed using data mining, which consists of numerous methods.
Proposed System:
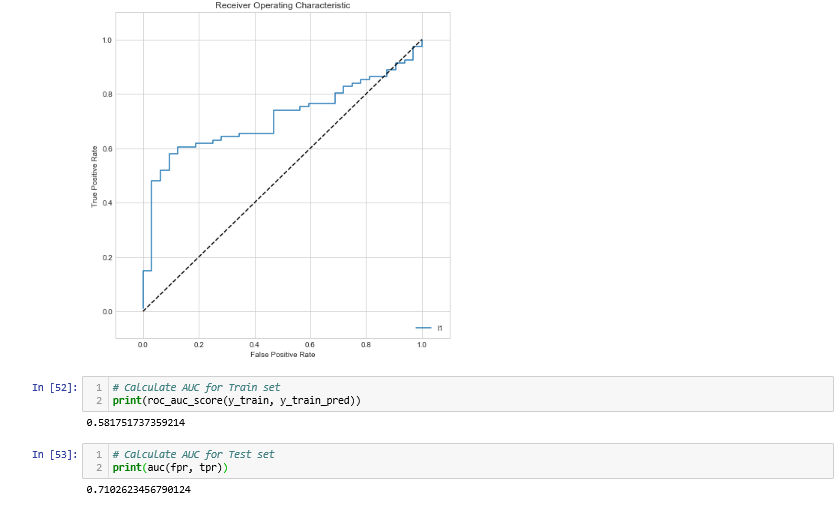
- The proposed churn prediction model is evaluated using metrics, such as accuracy, precision, recall, f-measure, and receiving operating characteristics (ROC) area. The results reveal that our proposed churn prediction model produced better churn classification.
- For classification purposes, we are using multiple machine learning algorithms like Decision tree, Random Forest, Linear Regression(LR), Support Vector Machine (SVM), Xgboost, and Adaboost classifiers, and then we compare the results with the highest accuracy classifier.
- Hence we improvised the accuracy and performance? Churn Modelling Analysis using Deep Learning | Machine Learning Projects

System Architecture:

Software and Hardware Requirements:
Hardware:
- OS ? Windows 7, 8, and 10 (32 and 64-bit)
- RAM? 4GB
Software:
- Python
- Anaconda






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.