
Description
Automatic Vehicle Speed Control System using IoT
ABSTRACT:
Most of the prevailing systems to control vehicle speed has a fixed speed control mechanism, which is not sufficient in places of high alert. The objective of this paper is to reduce the speed of the vehicle automatically in comparison with the maximum permissible speed limit of a particular location. The Real-Time Automatic Speed Control Unit we proposed is highly driver-friendly and the mechanical systems do not lose their functional integrity. The controlling part incorporated in this system fully avoids any kind of human intervention and integrates both mechanical and electronic systems. In this prototype, the zonal position and the associated maximum speed limit are collected using mobile GPS. The algorithm incorporated continuously monitors and compares the speed raised by manual acceleration and the maximum permissible speed of the particular location. Based on this, the speed of the motor is brought down to the speed limit assigned to that particular zone. The hardware complexity of the prototype presented in this paper is less since the speed of the vehicle motor is measured using an IR sensor and controlled electronically through the PWM technique. LabView simulation software is used for developing a virtual model of the system that enables embedding the prototype model directly on the vehicle. For testing, the prototype modeling was developed on an Arduino board.
Keywords-Bluetooth; GPS; IR sensor; PWM; speed control
Automatic Vehicle Speed Control System using IoT
INTRODUCTION:
The violation of traffic rules and regulations has contributed highly to the notable increase in the number and severity of road accidents. Most of these road accidents are caused because automobiles are driven at high speeds even in places of high alert and places where sharp turnings and junctions exist. Different vision-based techniques have been implemented to monitor traffic rule violations [8]. Even by providing strict rules and regulations from the government, the death rate has not been reduced. Automated driving applications such as forward collision warning [10] and cruise control and braking systems [11],[12] have been extensively researched. The objective of the work proposed in this paper is to realize the automatic speed control operation of the vehicle without any human interface; pass on timely information about the current speed of the vehicle and the permissible speed limit to the driver using an LCD display. Thereby, bringing a noticeable fall in the mortality rate and checking whether Government rules are followed correctly. The Real-Time Automatic Speed Controller that we propose is a decision-based controlling unit unifying Global Positioning System (GPS), which together can alter the speed of the vehicle based on the specific speed limit of the zone. The coordinate values of the GPS and the location-based speed limit of the zone are taken. These measures are used to bring down the speed of the moving vehicle to the permissible limit. Since there is no human interface in this project, there occurs no man-made errors such as calculation
Automatic Vehicle Speed Control System using IoT
PROPOSED SYSTEM:
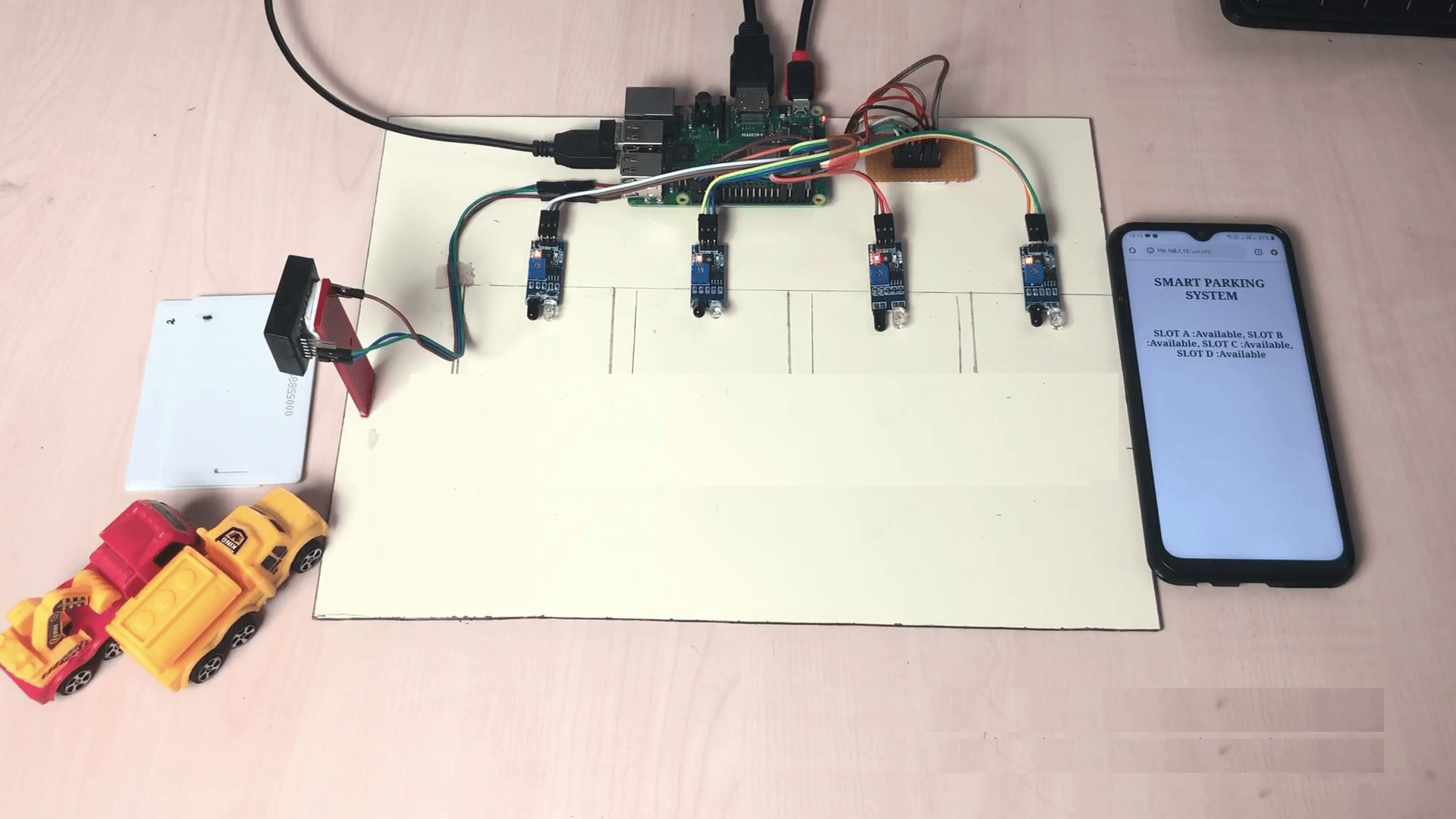
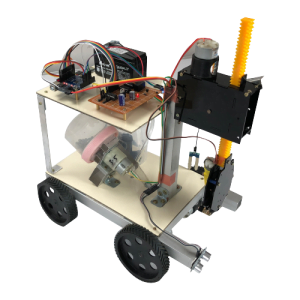
The proposed system is embedded with three main units – Bluetooth to transfer coordinate values and permissible speed of each location, an IR sensor to calculate the speed, and PWM to control the speed of the vehicle. The inclusion of the hardware modules in this prototype makes the system less complex. The work described in this paper consists of mainly two sections: LabView Implementation of the model and the Hardware Implementation of the prototype.
SOFTWARE TIPS
While boot loading the Atmega8 chip with Arduino 0010, there is an order (- i800) that makes the bootloader defer 10 minutes. Thus, in the event that you need to utilize a bootloader, use the order line rather than IDE, eliminating the “– i800” order and adding the “– F” order, or use Arduino 0007 IDE. To transfer draws Arduino 0010 turns out great.
Automatic Vehicle Speed Control System using IoT
CONCLUSION:
The Real-time automatic speed control system proposed in this paper has successfully traced the location of the vehicle and accordingly controlled the speed of the vehicle based on the maximum permissible speed limit of the location. Initially, the virtual environment of the model was set up using LabView for analysis and the hardware setup was built using Arduino. The current location speed was fetched with the aid of GPS co-ordinate values and it was, in turn, passed to the Arduino using Bluetooth. Based on this value the vehicle speed was controlled using the PWM method. The results from the experiment show that the speed of the vehicle has efficiently been controlled and brought down to the speed limit of the zone of high interest. Unifying the GPS and PWM modules provided the required advancement to the existing system.
Automatic Vehicle Speed Control System using IoT
REFERENCE:
[1] Silvia Magdici, Matthias Althoff, “Adaptive cruise control with safety guarantees for autonomous vehicles”, Science Direct, 2017.
[2] Shigeharu Miyata, Takashi Nagakami, Sei Kobayashi, Tomoji Izumi, Hisayoshi Naito, Akira Yanou, Hitomi Nakamura, and Shin Takehara, “Improvement of Adaptive Cruise Control Performance”, Journal of Advances in Signal Processing, 2010.
[3] Sai Vignesh H, Mohammed Shimil, Nagaraj M, Dr. Sharmila B, and Nagaraj Pandian M “RF-based Automatic Vehicle Speed limiter by controlling Throttle Valve”, International Journal of Innovative Research in Science & Technology, Vol.4, Issue 1,2015.
[4] Sugeno M, Nishida M, “Fuzzy Control of Model Car”, Journal of Fuzzy sets and systems, Vol. 16, pp.103-113.
[5] Y Yamamura, Y Seto, H Nishira and T Kawabe, “An ACC design method for achieving both string stability and ride comfort”, Journal of Systems Design and Dynamics, Vol. 2, no. 4, pp. 979-990, 2008






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Customer Reviews
There are no reviews yet.